2023.10.06
道路規制区間におけるラバーコーン設置・回収装置の開発

| 実施期間 | 2022年1月~7月 |
|---|---|
| 申請企業 | 株式会社オリエンテック |
| プロジェクトリーダー | 橋本岳 准教授 静岡大学 学術院工学領域 電気電子工学系列 |
| スカウト | 鈴木俊充 特任教授 静岡大学 イノベーション社会連携推進機構 産学連携推進部門 |
| ビジネス財務コーチ | 松浦大介 富士信用金庫 |
インタビュー動画
高速道路の規制区間に使用するラバーコーンに対し、画像計測技術を活用して、求められる作業速度でラバーコーンの設置間隔を正確に測定する画像計測アルゴリズムと、ラバーコーンの様々なスペックに対応し確実に設置・回収できる機構を開発。
課題
高速道路上にラバーコーンや標識を設置する機械は存在するが、専用のラバーコーンが必要で、設置速度も遅いため、現在も作業員が手作業で設置撤去している現場が多い。作業員の負担を減らし、ラバーコーンの種類を問わず、安全確実・スピーディーに交通規制をかけられるような新たな機械を考案して欲しい。
プロジェクト概要
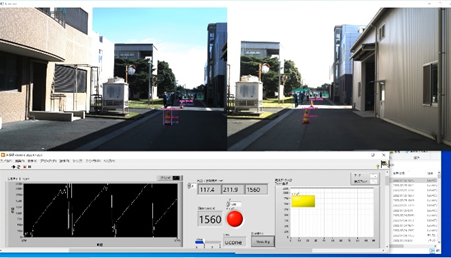
カメラ間の基線長0.7mで構成したステレオカメラと、事前にラバーコーン画像で機械学習させた物体検出により、道路上に設置されたラバーコーンを画像認識してその距離を計測できるようにし(制御装置)、別途試作したラバーコーン設置・回収装置(機構装置)とこの制御装置を組み合わせることで、移動しながら所定の間隔(20m or 10m)でラバーコーンを設置、および設置されたラバーコーンの回収を自動的に行うための試作機を開発。走行実験により目標達成を確認した。
期待される効果
ラバーコーンの設置・回収装置の製品化。手作業の作業員の負担を減らし、設置するラバコーンの種類を問わず安全確実・スピーディーに規制を掛けられるような新たな機械の実用化。
関連した光技術
ステレオカメラ 画像認識 画像計測