2026.06.15
3D-LiDARを活用した車両検知精度の向上

| 実施期間 | 2025年4月~2025年10月 |
|---|---|
| 申請企業 | 株式会社オリエンテック |
| プロジェクトリーダー | 静岡大学 学術院工学領域 - 機械工学系列 小林祐一 教授 |
| スカウト | 静岡大学 イノベーション社会連携推進機構 産学連携推進部門 鈴木俊充 特任教授 |
| ビジネス財務コーチ | 富士信用金庫 |
インタビュー動画
3D-LiDARを活用した車両検知装置の開発において、規制区域の認識およびそこに誤進入する車両の検出精度を向上させ、領域監視、車両の進入時に警告音ならびに光を発する装置を試作して、その動作、性能検証を実施した
課題
高速道路での工事において、規制区域内への車両の誤進入に対する作業員の安全確保が重要な課題となっている。これまでに赤外線で誤侵入車両を検知するシステムも開発したが、現在は、LiDARによりラバーコーンを認識して監視領域を自動的に設定し、そこに侵入物があった場合に検知する装置の試作開発を行っている。ラバーコーン検出精度の向上とノイズ対策をしたい
プロジェクト概要
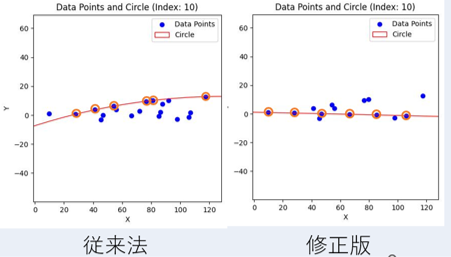
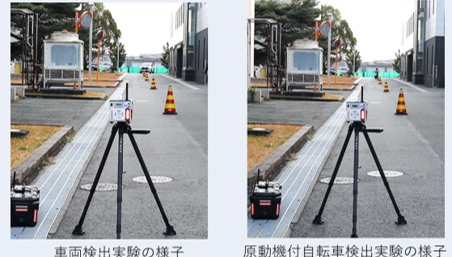
高速道路の工事規制区域内における作業員の安全確保のため、3D-LiDARを用いた車両検知器を開発した。規制区域区画用ラバーコーンのLiDAR計測に基づく監視領域識別と点群データから車両を検出するアルゴリズムの改良、LiDARの計測ノイズ低減ならびに振動面も考慮した車両検知装置構造体の改良、軽量化、動作状態のLED表示改善等を行い、屋外フィールドにて実際の走行車両を検知する試験と性能検証を実施した。成果物として、3D-LiDARによる検出器とそのソフトウェア試作品、評価結果報告書ならびに機器使用方法の説明書を作成した
期待される効果
高速道路上の工事規制区域内への車両侵入検知&警報装置の販売、工事規制区域内における作業員の安全確保(巻き込み事故削減)
関連した光技術
3D-LiDAR