成果事例
ロボット用複合現実オフラインティーチング技術の開発
Information

株式会社アラキエンジニアリング

静岡大学工学部
- 実施期間
- 2021年5月~2022年2月
- プロジェクトリーダー
- 伊藤 友孝 准教授 静岡大学 工学部
- スカウト
- 髙橋 一樹 客員教授 静岡大学 イノベーション社会連携推進機構 産学連携推進部門
- ビジネス財務コーチ
- 石塚 昇平 浜松磐田信用金庫
- インタビュー動画
バリ取りロボットの直感的なオフラインティーチングを可能にする、複合現実(Mixed Reality)ダイレクト・オフラインティーチングシステムの開発
- 課題
- バリ取り作業用ロボットのティーチングには膨大な時間と手間がかかり、その作業をオンラインで実施すると、その間ロボットの稼働を停止しなければならない。
オフラインで直感的、かつ熟練者の手技が行かせる形での新しいティーチングシステムを実現したい。
- プロジェクト概要
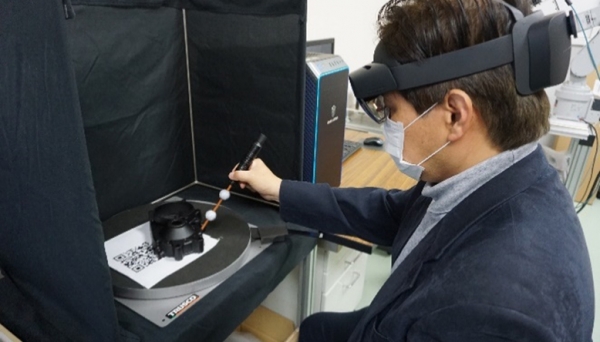
- バリ取り作業の対象となる部品を光学スキャンして直接3D点群データを作成した上で、ゴーグル型透過提示装置を用いて現物ワークと3D点群データや支援情報を重ね合わせて立体表示し、工具刃先を模した入力装置を用いてバリ取り位置や工具の姿勢、工具刃先を移動させる経路などの3Dデータを作業者が直接かつ直感的に教示できる、複合現実(Mixed Reality)を用いたダイレクト・オフラインティーチングシステムを実現できた。
- 期待される効果
- 実際の生産設備を停止することなく、バリ取り前と後の現物ワークがあれば、CADデータが無くとも、遠隔地でも教示データを作成可能となる。また、教示データ作成の際にバリ取り作業者の手技も反映できる。
- 関連した光技術
- 回転型光学式スキャニング装置、ゴーグル型透過提示装置、モーションキャプチャ