成果事例
自動運転搬送機器用統合制御ユニットの試作
Information
- 実施期間
- 2018年10月10日~2019年03月20日
- プロジェクトリーダー
- 朝間淳一准教授(静岡大学工学部機械工学科)
- スカウト
- 神谷眞好(フォトンバレーセンター)
- ビジネス財務コーチ
- 吉田和正(浜松磐田信用金庫)
- 依頼内容
- モータープールから特定車両をピックアップし、目的地まで搬送し、定められた位置にドロップする自動運転車両を開発したい。そこで、自動搬送機の統合制御ユニットを試作してほしい。
- 成果概要
- 静岡大学の学部・学科をまたいだ3研究室の技術を融合して統合制御ユニットを試作した。統合制御ユニットを評価用輸送機器に実装し、キャンパス内で走行試験を行い良好な結果を得た。
・モーター制御による操舵技術
ギアとともに駆動用モータを架台車両に取り付け、更に操舵用モータも組み込んだ。架台車両には、バッテリー、モーターコントローラ、インバータもマウントし、単独で走行可能なテスト車両を試作し、走行テストを実施した。
・高精度測位技術による自動運転
小型車両ロボットにて、RTK高精度測位技術とロボットOSをベースとしたナビゲーションシステムを構築し、自動運転実験において動作確認を行った。
・統合制御ユニットの試作
モーターコントロール技術と高精度測位技術を統合した制御ユニットを試作した。このユニットを評価用輸送機器に組み込んで、各種評価実験を行った。
・キャンパス内での走行実験
大学構内を走行する実験を行った。今後,高精度測位した位置情報に基づいてモーターコントロールによる操舵制御を行い、予め設定したルートにて自動運転実験を実施する予定である.
- 期待される効果
- ・物流現場の効率改善
・物流現場の安全確保
- 製品化への取り組み
- 統合制御ユニットは支援依頼企業が参考にして無人搬送機器の実用化開発に供される。
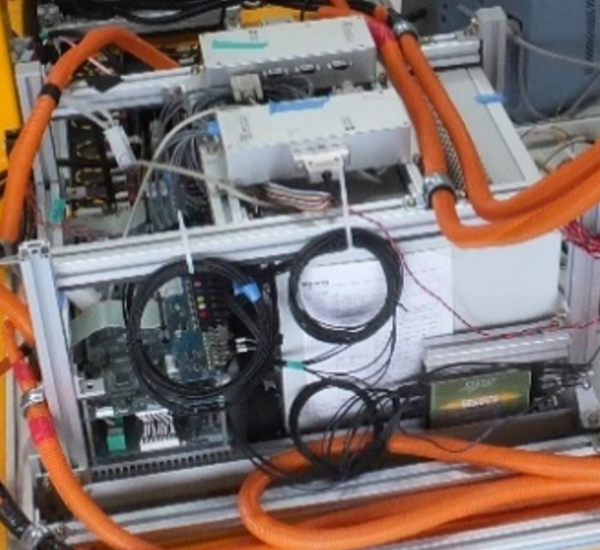
- 試作した統合制御ユニット

- 統合制御ユニットを実装した評価用搬送機器
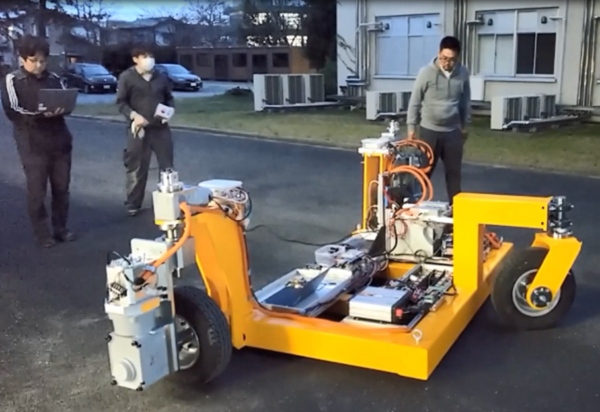
- キャンパス内走行実験の様子